Journals > > Topics > Machine Vision
Machine Vision|6 Article(s)
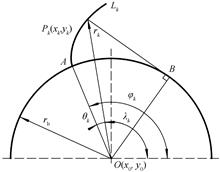
Camera Pose Estimation Algorithm for Singular Configuration of Target Points
Linmei ZHU, Xiucheng DONG, Zhengyu ZHANG, Fan ZHANG, Haibin WANG, and Lei REN
Aiming at improving the accuracy and stability of the pose estimation when the target points located in the planar, quasi-planar and quasi-linear case. In this study, we propose an iterative solution for singular configuration of target points. The main idea of the algorithm is to select two farthest points as the basic reference points, and divide n points into n-2 three-point sets. Then, the auxiliary points are constructed according to the geometric relationship of the three-point set, aiming to increase the geometric constraints of the perspective similar triangle algorithm, and obtain a more accurate initial value. Finally, the simplified EPnP algorithm is combined with Gaussian Newton algorithm for optimization. Experiments conducted on synthetic data and real images show that when the number of planar target points n=4, the average image re-projection error of this algorithm is 0.003 mm, compared with the orthogonal iterative algorithm, EPnP algorithm and IEPnP algorithm, which is 0.062 mm, 0.324 mm and 2.238 mm respectively, this algorithm effectively improves the accuracy and stability of the pose estimation of the target point in singular configuration. Aiming at improving the accuracy and stability of the pose estimation when the target points located in the planar, quasi-planar and quasi-linear case. In this study, we propose an iterative solution for singular configuration of target points. The main idea of the algorithm is to select two farthest points as the basic reference points, and divide n points into n-2 three-point sets. Then, the auxiliary points are constructed according to the geometric relationship of the three-point set, aiming to increase the geometric constraints of the perspective similar triangle algorithm, and obtain a more accurate initial value. Finally, the simplified EPnP algorithm is combined with Gaussian Newton algorithm for optimization. Experiments conducted on synthetic data and real images show that when the number of planar target points n=4, the average image re-projection error of this algorithm is 0.003 mm, compared with the orthogonal iterative algorithm, EPnP algorithm and IEPnP algorithm, which is 0.062 mm, 0.324 mm and 2.238 mm respectively, this algorithm effectively improves the accuracy and stability of the pose estimation of the target point in singular configuration.
Acta Photonica Sinica
- Publication Date: Jul. 25, 2021
- Vol. 50, Issue 7, 285 (2021)


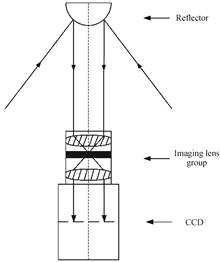
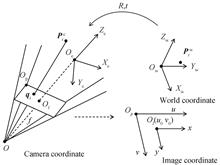
Research on Visual Odometry Based on Catadioptric Panoramic Camera
Yu ZHANG, Xiping XU, Ning ZHANG, Yaowen LÜ, and Yi LU
In order to realize the real-time positioning of the catadioptric panoramic camera, a visual odometry method based on the feature point method that can be applied to the catadioptric panoramic camera was proposed. the initialization module for the projection model of the catadioptric panoramic camera was designed for the initialization of the camera pose. In the initialization module, a spherical epipolar geometry suitable for catadioptric panoramic cameras was proposed, and the posture change relationship between two frames of images during the initialization process was calculated through the spherical epipolar geometry. In order to verify the robustness and accuracy of the algorithm, in the same scene, the algorithm in this paper was compared with the visual mileage calculation method using the feature point method of the pinhole camera. The results show that, in the case of using catadioptric panoramic camera, the accuracy of visual odometry in outdoor scenes and indoor scenes improves by 38% and 50%. In order to realize the real-time positioning of the catadioptric panoramic camera, a visual odometry method based on the feature point method that can be applied to the catadioptric panoramic camera was proposed. the initialization module for the projection model of the catadioptric panoramic camera was designed for the initialization of the camera pose. In the initialization module, a spherical epipolar geometry suitable for catadioptric panoramic cameras was proposed, and the posture change relationship between two frames of images during the initialization process was calculated through the spherical epipolar geometry. In order to verify the robustness and accuracy of the algorithm, in the same scene, the algorithm in this paper was compared with the visual mileage calculation method using the feature point method of the pinhole camera. The results show that, in the case of using catadioptric panoramic camera, the accuracy of visual odometry in outdoor scenes and indoor scenes improves by 38% and 50%.
Acta Photonica Sinica
- Publication Date: Apr. 25, 2021
- Vol. 50, Issue 4, 182 (2021)
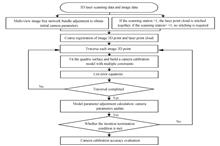
Camera Calibration Method with Multi-condition Constraints Based on Laser Points
Cailin LI, Benya SU, Baoyun GUO, Zhiyong WANG, and Fuhong ZHU
A camera calibration method based on multi-condition constraints of laser point cloud is proposed to overcome the dependence of camera calibration on the 2D/3D calibration field. The initial camera parameters are obtained by bundle adjustment from the multi-view image obtained by the camera. Then, based on the collinear equation, the mathematical model of the multi-condition constraints camera calibration is established by using the position relationship between the image point cloud and its nearest laser point cloud. Furthermore, the least square method with inequality constrains is used to calculate the camera parameters iteratively. The camera calibration accuracy of the method is compared with that of the 3D control field. The experiment results show that it is equivalent to the calibration accuracy based on the 3D control field. The average error difference between the two laser point cloud reflection is less than 0.1 pixel, which further verifies the feasibility of the method without traditional control field. A camera calibration method based on multi-condition constraints of laser point cloud is proposed to overcome the dependence of camera calibration on the 2D/3D calibration field. The initial camera parameters are obtained by bundle adjustment from the multi-view image obtained by the camera. Then, based on the collinear equation, the mathematical model of the multi-condition constraints camera calibration is established by using the position relationship between the image point cloud and its nearest laser point cloud. Furthermore, the least square method with inequality constrains is used to calculate the camera parameters iteratively. The camera calibration accuracy of the method is compared with that of the 3D control field. The experiment results show that it is equivalent to the calibration accuracy based on the 3D control field. The average error difference between the two laser point cloud reflection is less than 0.1 pixel, which further verifies the feasibility of the method without traditional control field.
Acta Photonica Sinica
- Publication Date: Apr. 25, 2021
- Vol. 50, Issue 4, 172 (2021)

Point Cloud Registration Based on Neighborhood Characteristic Point Extraction and Matching
Xin-chun LI, Zhen-yu YAN, Sen LIN, and Di JIA
In order to solve the problem of poor robustness and low registration accuracy of the iterative closest point algorithm under noise interference and data loss, a point cloud registration method based on neighborhood characteristic point extraction and matching is proposed. Firstly, a neighborhood characteristic parameter is defined, which is composed of three parts: the k-neighborhood curvature of the point, the normal vector inner product' mean value of the point and the neighborhood points, and the distance variance between the neighborhood points and the neighborhood fitted plane. Neighborhood characteristic parameters and curvature characteristic parameters constructed on moving least square surface are used to extract feature points twice. Secondly, three matching conditions are defined according to the histogram features, and the correct matching point pairs are obtained by double constraints. Finally, in the registration stage, the iterative closest point algorithm of bi-directional k-dimension tree is used to achieve accurate registration. The experimental results show that the registration accuracy of the proposed algorithm is more than 90% higher than that of the iterative closest point algorithm, and it can effectively complete the registration of missing point clouds in noisy environment, which has obvious advantages in robustness and precise registration. In order to solve the problem of poor robustness and low registration accuracy of the iterative closest point algorithm under noise interference and data loss, a point cloud registration method based on neighborhood characteristic point extraction and matching is proposed. Firstly, a neighborhood characteristic parameter is defined, which is composed of three parts: the k-neighborhood curvature of the point, the normal vector inner product' mean value of the point and the neighborhood points, and the distance variance between the neighborhood points and the neighborhood fitted plane. Neighborhood characteristic parameters and curvature characteristic parameters constructed on moving least square surface are used to extract feature points twice. Secondly, three matching conditions are defined according to the histogram features, and the correct matching point pairs are obtained by double constraints. Finally, in the registration stage, the iterative closest point algorithm of bi-directional k-dimension tree is used to achieve accurate registration. The experimental results show that the registration accuracy of the proposed algorithm is more than 90% higher than that of the iterative closest point algorithm, and it can effectively complete the registration of missing point clouds in noisy environment, which has obvious advantages in robustness and precise registration.
Acta Photonica Sinica
- Publication Date: Jan. 01, 2020
- Vol. 49, Issue 4, 0415001 (2020)
Classification of Edge Distortion of Tooth Profile Image Based on Improved Twin Support Vector Machine
He SUN, Wen-zhen ZHAO, Wen-hui ZHAO, and Zhen-yun DUAN
Proposed a partial binary tree twin support vector machine multi-classification algorithm based on optimal classification features (OCF-PBT-TWSVM) to achieve effective classification of non-stationary transient random signals with edge distortion of tooth profile images, and to meet the requirements of real-time gear vision measurement and distortion compensation accuracy Claim. Selected the maximum value vm of the edge dynamic component signal, the position of the edge distortion signal qu, and the edge distortion rate rlv to formed the feature vector,which constituted the training sample set and the test sample set at the same time; defined the variable weight feature vector measure γ with the target of distortion compensation, and completed the construction of the OCF-PBT-TWSVM algorithm according to γ decreasing; used the particle swarm optimization method to optimize the algorithm parameters to optimize the performance of the c1, c2, and g parameters. The test results show that, the final classification accuracy of the OCF-PBT-TWSVM multi-classification algorithm proposed in this paper is 96.96% in the case of small sample data, which has better classification effect and training speed than the PBT-SVM multi-classification algorithm. It is faster and can satisfy the requirements of subsequent distortion compensation measurement accuracy and real-time gear vision measurement. Proposed a partial binary tree twin support vector machine multi-classification algorithm based on optimal classification features (OCF-PBT-TWSVM) to achieve effective classification of non-stationary transient random signals with edge distortion of tooth profile images, and to meet the requirements of real-time gear vision measurement and distortion compensation accuracy Claim. Selected the maximum value vm of the edge dynamic component signal, the position of the edge distortion signal qu, and the edge distortion rate rlv to formed the feature vector,which constituted the training sample set and the test sample set at the same time; defined the variable weight feature vector measure γ with the target of distortion compensation, and completed the construction of the OCF-PBT-TWSVM algorithm according to γ decreasing; used the particle swarm optimization method to optimize the algorithm parameters to optimize the performance of the c1, c2, and g parameters. The test results show that, the final classification accuracy of the OCF-PBT-TWSVM multi-classification algorithm proposed in this paper is 96.96% in the case of small sample data, which has better classification effect and training speed than the PBT-SVM multi-classification algorithm. It is faster and can satisfy the requirements of subsequent distortion compensation measurement accuracy and real-time gear vision measurement.
Acta Photonica Sinica
- Publication Date: Oct. 15, 2020
- Vol. 49, Issue 10, 1015002 (2020)

Flotation Performance Recognition Based on Dual-modality Convolutional Neural Network Adaptive Transfer Learning
Yi-peng LIAO, Jie-jie YANG, Zhi-gang WANG, and Wei-xing WANG
In order to improve the effect of CNN feature driven flotation performance recognition under small-scale training set, a method of flotation performance recognition based on adaptive transfer learning and CNN features extraction of foam infrared and visible images is proposed. Firstly, a dual-modality CNN feature extraction and recognition model based on AlexNet was constructed, and the structural parameters of the model were pre-trained through RGB-D large-scale data set. Secondly, a series of double hidden layer automatic encoder extreme learning machine is used to replace the full connection layer of the pre-training model, so that the dual-modality CNN features can be fused and abstracted layer by layer, and then the decision is made by mapping to higher dimensional space through the kernel extreme learning machine. Finally, the floatation small-scale data set is constructed to train the migrated model, and the improved quantum wolf pack algorithm is used for model parameter optimization. Experimental results show that, adaptive transfer learning can significantly improve the accuracy of recognition in small sample data sets, the accuracy of performance recognition using dual-modality CNN transfer learning is 3.06% higher than that of single-mode CNN transfer learning, and the average recognition accuracy of each working condition reached 96.86%. The accuracy and stability of flotation performance recognition is greatly improved compared with the existing methods. In order to improve the effect of CNN feature driven flotation performance recognition under small-scale training set, a method of flotation performance recognition based on adaptive transfer learning and CNN features extraction of foam infrared and visible images is proposed. Firstly, a dual-modality CNN feature extraction and recognition model based on AlexNet was constructed, and the structural parameters of the model were pre-trained through RGB-D large-scale data set. Secondly, a series of double hidden layer automatic encoder extreme learning machine is used to replace the full connection layer of the pre-training model, so that the dual-modality CNN features can be fused and abstracted layer by layer, and then the decision is made by mapping to higher dimensional space through the kernel extreme learning machine. Finally, the floatation small-scale data set is constructed to train the migrated model, and the improved quantum wolf pack algorithm is used for model parameter optimization. Experimental results show that, adaptive transfer learning can significantly improve the accuracy of recognition in small sample data sets, the accuracy of performance recognition using dual-modality CNN transfer learning is 3.06% higher than that of single-mode CNN transfer learning, and the average recognition accuracy of each working condition reached 96.86%. The accuracy and stability of flotation performance recognition is greatly improved compared with the existing methods.
Acta Photonica Sinica
- Publication Date: Oct. 15, 2020
- Vol. 49, Issue 10, 1015001 (2020)
Topics
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20